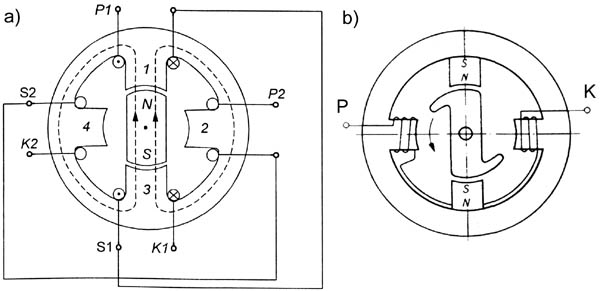
Rys. 3.1 Budowa silnika z wirnikiem czynnym w postaci magnesu stałego (a) i z wirnikiem biernym (b).
Mianem silników skokowych określa się silniki prądu przemiennego, w których pole magnetyczne nie wiruje równomiernie, lecz skokowo, w zależności od sygnałów sterujących. Silnik przetwarza sygnały sterujące na ustalone położenia kątowe wału bezpośrednio, bez konieczności stosowania jakichkolwiek sprzężeń zwrotnych. Impulsy sterujące powodują, że uzwojenia silnika zostają zasilone za pośrednictwem komutatora elektronicznego odpowiednim układem napięć utrzymywanych na nich do czasu pojawienia się następnych impulsów wynikających z kolejnego taktu komutacji. Kątowe przemieszczenie wirnika o określoną wartość nazywa się skokiem (krokiem).
Silnik skokowy ma na stojanie jedno, dwa lub cztery (czasem więcej) uzwojenia sterujące, przesunięte względem siebie w przestrzeni. W zależności od rodzaju wirnika, silniki skokowe dzielą się na silniki z wirnikiem biernym i silniki z wirnikiem czynnym. Silnik z wirnikiem czynnym ma na wirniku uzwojenie wzbudzenia zasilane prądem stałym lub magnesy trwałe. Wirnik bierny jest uzębiony, lecz nie posiada żadnego uzwojenia. Na rysunku 3.1 przedstawiono poglądowo budowę silnika z wirnikiem czynnym i biernym.
Silnik z wirnikiem czynnym przedstawiony na rys. 3.1a może pracować w trybie dwufazowym lub czterofazowym. W pierwszym przypadku uzwojenie PxKx jest traktowane jak jedno uzwojenie. Wyprowadzenia S1 i S2 nie są wykorzystywane. W drugim przypadku, dla czterofazowego trybu pracy, środki uzwojeń podłączane są do stałego potencjału (zasilania lub masy), a każde z uzwojeń wysterowywane jest oddzielnie. Silnik przedstawiony na rys. 3.1b posiada wirnik bierny o dwóch zębach i specjalnie ukształtowanych nabiegunnikach, które wyznaczają jeden kierunek wirowania. Stojan silnika jest czterobiegunowy. Jedną parę biegunów stojana stanowią magnesy stałe, a na drugiej parze umieszczone jest uzwojenie sterujące. Jeżeli prąd w uzwojeniu sterującym jest równy zeru, wówczas oś wirnika pokrywa się z osią magnesów stałych. Kiedy uzwojenie na drugiej parze biegunów otrzyma impuls sterujący wówczas, pod wpływem pola biegunów, na których jest ono umieszczane, wirnik obróci się o kąt 90° w kierunku wystającego nabiegunnika. Oś wirnika pokryje się z osią biegunów z uzwojeniem. Oczywiście pole wytworzone w wyniku pojawienia się impulsu sterującego musi być w stanie pokonać przyciąganie magnesów trwałych i obciążenie na wale silnika. Po zaniku impulsu sterującego wirnik wykona kolejny skok o 90°, a jego oś ponownie pokryje się z osią biegunów z magnesami stałymi. Konstrukcja przestawiona na rys. 3.1b może być wykonana z dowolną liczbą biegunów stojana. Liczba biegunów wirnika biernego powinna być dwukrotnie mniejsza od liczby biegunów stojana.
Dla silnika z wirnikiem czynnym skok silnika określany jest na podstawie wyrażenia: (3.1)
(3.1) (3.2)
(3.2)Jeżeli liczba biegunów stojana nie jest równa liczbie biegunów wirnika wówczas za p do wzoru (3.1) podstawia się tę liczbę par biegunów, która jest większa. Jak wynika z zależności (3.1) zmniejszenie skoku jest możliwe przez zwiększenie liczby biegunów lub liczby uzwojeń sterujących. Typowy układ połączeń dla silnika z czteropasmowymi uzwojeniami przedstawiono na rysunku 3.2a, a na rysunku 3.2b przedstawiono cykl komutacji niezbędny do prawidłowej pracy silnika.
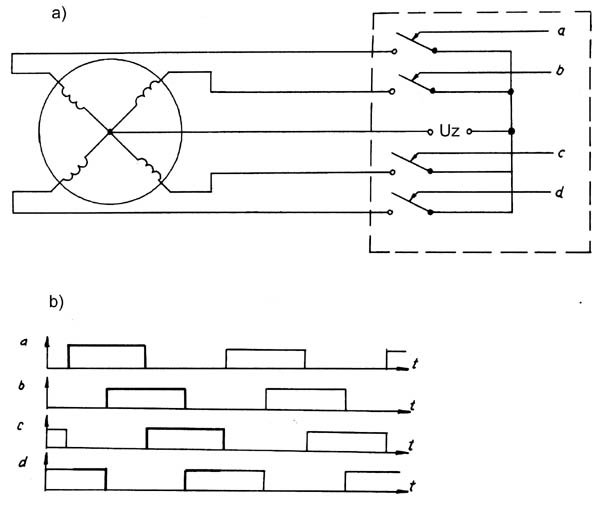
Zaletą silnika tego typu jest możliwość zasilania napięciem o jednej polaryzacji, co upraszcza układy sterujące. Przykładowe rozwiązanie układu sterującego silnikiem przedstawiono na rysunku 3.3.
Do wytworzenia ciągów fal prostokątnych zgodnych z rys. 3.3c wykorzystano układ zrealizowany na elementach cyfrowych 74LS51 - bramki typu END-NOR oraz 74LS74 - przerzutniki typu D. Odpowiedni układ sprzężeń zwrotnych oraz doprowadzone do wejść T impulsy zegarowe zapewniają wytworzenie wymaganej sekwencji przebiegów na wyjściach QA¸ QD. Zasada działania układu jest następująca. Załóżmy, że początkowo, po włączeniu zasilania, przerzutniki układu US2 były wyzerowane (Q= 0, /Q = 1) oraz, że przełącznik S1 ustawiony był w położeniu: kierunek wirowania - w prawo, to oznacza, że na wyjściu inwertera US3/2 była logiczna 1. Wówczas na wejściach bramek układu US1 stany będą następujące:
Biorąc pod uwagę, że bramki wejściowe układu US1 są typu AND, a sumatorami są układy typu NOR odpowiednia funkcja logiczna F będzie zgodna z podaną zależnością (3.3).
Tak więc dla wejściowych stanów podanych powyżej, na wyjściu US1/6 stan będzie wysoki (logiczne 1), a na wyjściu drugim US1/8 niski (logiczne 0). Ponieważ wyjścia układu US1 połączone są z odpowiednimi wejściami D układu US2, dodatnie zbocza pierwszego impulsu zegarowego, który się pojawi na wejściach T1 i T2 przepisze informacje z wejść D na wyjścia Q, co spowoduje w przypadku wyjścia Q1 i /Q1 zmianę stanu i tym samym odpowiednie przeprogramowanie stanów na wejściach bramek dla drugiego przerzutnika.
Odpowiednio zilustrowane jest to na rys. 3.3c. Wyjścia Q2 i /Q2 pozostaną w niezmienionym stanie. Po pierwszym impulsie zegarowym stan logiczny na wejściu D1 nie zmieni się, ulegnie zmianie natomiast stan logiczny na wejściu D2. Drugi impuls zegarowy spowoduje zmianę stanu na wyjściach Q2 i /Q2, natomiast stan na wyjściach Q1 i /Q1 nie ulegnie zmianie.
Prowadząc dalej analizę układu łatwo zauważyć, że na danym wyjściu zmiana stanu następuje dla co drugiego impulsu zegarowego, natomiast każdy impuls zegarowy powoduje zmianę stanu równocześnie na dwóch wyjściach.
Aby zapewnić odpowiednią wydajność prądową do bezpośredniego sterowania uzwojeniami silnika zastosowano tranzystorowe bufory mocy. Przez zmianę warunków początkowych za pomocą przełącznika S1, możliwa jest zmiana kolejności pobudzania faz silnika, a tym samym zmiana kierunku obrotów.
Sterowanie silnikami dwufazowymi posiadającymi dwie cewki (lub dwie grupy cewek), jest nieco trudniejsze gdyż prąd płynący w cewkach musi zmieniać kierunek. Typowe przebiegi impulsów sterujących cewkami przedstawiono na rysunku 3.4, natomiast na rysunku 3.5 przedstawiono poglądowo mostkowy układ sterowania uzwojeniami silnika dwufazowego oraz przebiegi impulsów sterujących niezbędnych do jego prawidłowej pracy.
Układ zrealizowano w formie dwóch wzmacniaczy mostkowych, z których każdy zasila jedną cewkę. Każda z połówek wzmacniacza zrealizowana jest w postaci układu dwustopniowego mostkowego i składa się ze wzmacniacza napięciowego, zbudowanego na pojedynczym tranzystorze (T1,T6,T7,T12) oraz pary komplementarnej pracującej w układzie wtórnika emiterowego (T2, T3, T4, T5, T8, T9, T10, T11).
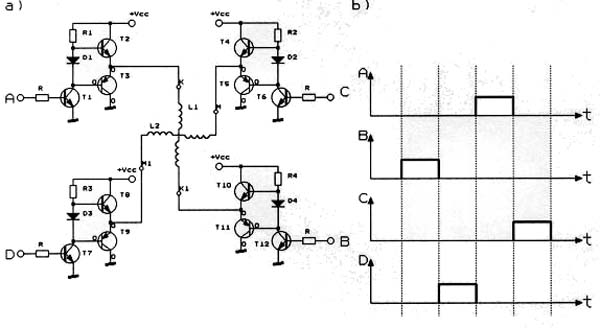
Zasada pracy układu mostkowego polega na naprzemiennym przewodzeniu tranzystorów w przeciwległych gałęziach mostka. Ten warunek zapewnić musi odpowiedni ciąg sygnałów sterujących, które dla poszczególnych połówek mostka muszą mieć przeciwną polaryzację. Ujemny impuls (0 logiczne) podany na bazę tranzystora T1 spowoduje jego zablokowanie w wyniku czego nastąpi zablokowanie tranzystora T3 (PNP), a wysterowanie tranzystora T2 (NPN) przez wzrost potencjału na bazie. W tym samym czasie podany zostaje impuls dodatni na bazę tranzystora T12, co spowoduje jego nasycenie, zatkanie tranzystora T10 (NPN) oraz wysterowanie tranzystora T11 (PNP). W ten sposób prąd będzie płynął przez cewkę L1 od punktu K do K1. W cyklu następnym powinien ustać przepływ prądu przez cewkę L1, a przez cewkę L2 prąd powinien popłynąć w kierunku od punktu M do M1.
W celu zablokowania przepływu prądu przez cewkę L1 należy podać sygnały o jednakowych polaryzacjach na bazy tranzystorów T1 i T12 (mogą to być np. sygnały 0 logiczne). W celu wymuszenia przepływu prądu w odpowiednim kierunku przez cewkę L2 należy podać sygnał ujemny na bazę tranzystora T6, co spowoduje wysterowanie tranzystora T4 (NPN), oraz impulsu o polaryzacji dodatniej na bazę tranzystora T7. Kolejne dwa cykle sekwencji wymagają wysterowania cewek L1 i L2 prądem płynącym w przeciwnym kierunku, co wymaga zmiany polaryzacji przyłożonych poprzednio impulsów na przeciwną.
Zastosowanie silników skokowych pozwala na znaczne uproszczenie konstrukcji mechanicznej urządzenia i przeniesienie znaczącej części odpowiedzialności za poprawność pozycjonowania na układy elektroniczne i oprogramowanie, a te jeżeli już raz zaczęły działać dobrze, to z reguły działają dobrze przez dłuższy czas. Zaletą układów z napędem linkowym jest duża szybkość przemieszczania. Okupione jest to jednak większą awaryjnością systemu i trudniejszym serwisem (skomplikowana wymiana linek i potencjometrów pozycjonera).